Der Betrieb von Straßen-Video-Meßsystemen aus vermessungstechnischer Sicht
Von Dipl.-Ing. Johannes Gruss
1. Die Anweisung Straßen-Datenbank als Grundlage
Anfang der 60er-Jahre wurden die Anforderungen an die Bereitstellung von straßenbezogenen Informationen derart umfangreich, dass eine weitergehende Handhabung dieser Daten mittels Karteikarten und Handbetrieb nicht mehr tragbar war. Zugriffsgeschwindigkeit und Fehlerträchtigkeit dieses Systems zwangen die Betreiber dieser Datenhaltungen zu einem Umstieg auf eine computergestützte Datenverarbeitung.
Diese Überlegungen wurden zu Beginn der 60er Jahre in einer Rahmenvorschrift des damaligen Bundesministers für Verkehr (BMV) zusammengestellt und als Anweisung Straßendatenbank (ASB) den Ländern als Grundlage für ihre Datenhaltungen anempfohlen [ASB-SIB-Netz][ASB-SIB-Objekte]. Diese ASB sah vor, dass technische, administrative und finanztechnische Daten in einem äusserst umfassenden Datenmodell behandelt werden sollten – heute würde man von einer Eier-legenden-Woll-Milch-Sau sprechen. Der geforderte hohe Anspruch an eine möglichst allgemeine und umfassende Datenbasis konnte nie erfüllt werden. Einzig die technische Seite dieser Datenbank wurde in einigen Bundesländern realisiert. So setzten die Bundesländer Baden-Württemberg, Rheinland-Pfalz, Hessen und Nordrhein-Westfalen die Vorgaben der ASB – bezogen auf deren technischen Teil – weitgehend um, Bayern variierte deren Vorgaben und die restlichen Länder entwickelten – wenn überhaupt – eigenständige Lösungen.
Diese technischen Daten umfassen folgende Datenarten (DA), die man heute als Objektklassen bezeichnen würde:
|
DA100, DA120 |
Festlegungen Ordnungssystem (logisch / geometriefrei) |
|
DA101, DA102, DA103 |
Stationierungsdaten |
|
DA104 |
Straßenquerschnittsdaten; Breite der Fahrbahnstreifen |
|
DA105 |
Straßenaufbaudaten; Bauart, Dicke und Baujahr der einzelnen Schichten einer Straßenbefestigung |
|
DA106 |
Grundrissdaten; Beschreibung des Straßenverlaufes mittels Gerade, Kreis und Klothoide |
|
DA107 |
Straßenaufrißdaten; Längs- und Querneigung (Profile) der Straße |
|
DA108 |
Zählstellen |
|
DA122 |
Koordinaten (zur absoluten geometrischen Festlegung) |
|
DA151 - DA156 |
Daten der Bauwerksdatei |
Grundlage
der ASB ist das sogenannte Ordnungssystem
(OS),
welches ein logisches Abbild des Straßennetzes wiedergibt:
es fehlt zunächst jeder eindeutige geometrische Bezug zur
Realität. Das Ordnungssystem besteht aus Netzknoten
(NK),
die in der Realität Straßenkreuzungen o.ä. entsprechen.
Einzelne Netzknoten werden durch Graphen verbunden, die
laut ASB als Netzknotenabschitte
(NKA)
zu bezeichnen sind. Ein eindeutiger Zugriff auf Daten einer
bestimmten Straße erfolgt mit Hilfe folgender Zuordnungen:
<Von-Netzknoten> + <Nach-Netzknoten> + <Station> + <Datenart> + <Attribute>
 Wurden Straßen einer
einheitlichen Bezeichnung (z.B. A1) früher von ihrem
physischen Anfang bis zu ihrem Ende mit einer durchgehenden
Kilometrierung versehen, so werden nach der ASB nur
noch die einzelnen Netzknotenabschitte mit einer
durchgehenden Kilometrierung angegeben – genannt Stationierung.
Die Gesamtlänge ergibt sich dann durch die Abfolge der
einzelnen Abschnittslängen. Eine Längenangabe innerhalb
eines Netzknotenabschitts wird als Station
bezeichnet; eine Längenabgabe im alten System, welches auf
einen Straßenzug angewandt wird, nennt man Strecken- oder
Betriebs-Kilometer. Auf den bundesdeutschen
Autobahnen werden noch heute beide Systeme parallel
verwendet: Der Bund hat das gesamte Autobahnnetz
durchkilometriert, während die ASB-Länder auf 'ihren'
Autobahnen zusätzlich das Ordnungssystem gemäß ASB
eingeführt haben. Auch wenn man die Längen der
Netzknotenabschitte kennt, eine Netzgeometrie ist damit noch
nicht vorhanden. Berücksichtigt man die DA106 (Trassierung),
so kennt man zwar das Aussehen der Trasse als solches,
nicht jedoch die Netzgestalt, da die Lage der
Netzknotenpunkte selbst noch nicht bestimmt wurde.
Überhaupt waren Koordinaten in früheren Fassungen
der ASB schlichtweg unbekannt, wurden später aber mit der
DA122 eingeführt – ansonsten hätte man keine Netzübersichten
ausplotten können.
Wurden Straßen einer
einheitlichen Bezeichnung (z.B. A1) früher von ihrem
physischen Anfang bis zu ihrem Ende mit einer durchgehenden
Kilometrierung versehen, so werden nach der ASB nur
noch die einzelnen Netzknotenabschitte mit einer
durchgehenden Kilometrierung angegeben – genannt Stationierung.
Die Gesamtlänge ergibt sich dann durch die Abfolge der
einzelnen Abschnittslängen. Eine Längenangabe innerhalb
eines Netzknotenabschitts wird als Station
bezeichnet; eine Längenabgabe im alten System, welches auf
einen Straßenzug angewandt wird, nennt man Strecken- oder
Betriebs-Kilometer. Auf den bundesdeutschen
Autobahnen werden noch heute beide Systeme parallel
verwendet: Der Bund hat das gesamte Autobahnnetz
durchkilometriert, während die ASB-Länder auf 'ihren'
Autobahnen zusätzlich das Ordnungssystem gemäß ASB
eingeführt haben. Auch wenn man die Längen der
Netzknotenabschitte kennt, eine Netzgeometrie ist damit noch
nicht vorhanden. Berücksichtigt man die DA106 (Trassierung),
so kennt man zwar das Aussehen der Trasse als solches,
nicht jedoch die Netzgestalt, da die Lage der
Netzknotenpunkte selbst noch nicht bestimmt wurde.
Überhaupt waren Koordinaten in früheren Fassungen
der ASB schlichtweg unbekannt, wurden später aber mit der
DA122 eingeführt – ansonsten hätte man keine Netzübersichten
ausplotten können.
 Obwohl es auf den ersten
Blick vollkommen nebensächlich erscheint, ob man die Länge
einer Straße nun abschnittsweise oder durchgehend behandelt,
so sei darauf hingewiesen, dass sich Längenänderungen auf
Grund von Baumaßnahmen im Kilometrierungssystem nur sehr
schwer fortführen lassen, während sie im
Stationierungssystem lediglich einen einzelnen
Netzknotenabschitt betreffen. Tatsächlich waren die
handgeführten Daten aus der Zeit vor der ASB durch hunderte
– wenn nicht tausende – von zu berücksichtigenden
Längenänderungen eigentlich gar nicht mehr nutzbar. Das
gleiche Problem ergab sich auch bei der Übernahme von Daten
aus den DDR-Straßenbüchern, was vielfach auf eine
vollkommene Neuaufnahme hinauslief.
Obwohl es auf den ersten
Blick vollkommen nebensächlich erscheint, ob man die Länge
einer Straße nun abschnittsweise oder durchgehend behandelt,
so sei darauf hingewiesen, dass sich Längenänderungen auf
Grund von Baumaßnahmen im Kilometrierungssystem nur sehr
schwer fortführen lassen, während sie im
Stationierungssystem lediglich einen einzelnen
Netzknotenabschitt betreffen. Tatsächlich waren die
handgeführten Daten aus der Zeit vor der ASB durch hunderte
– wenn nicht tausende – von zu berücksichtigenden
Längenänderungen eigentlich gar nicht mehr nutzbar. Das
gleiche Problem ergab sich auch bei der Übernahme von Daten
aus den DDR-Straßenbüchern, was vielfach auf eine
vollkommene Neuaufnahme hinauslief.
 Für einen Vermesser
ungewohnt ist zunächst die Genauigkeit, auf der die
Längenmessung in der ASB basiert. Würde man bei Trassierungen
Millimetergenauigkeit erwarten, so wird man erstaunt
feststellen, dass die Stationierung lediglich auf runden
Meterwerten beruht. Warum man dieses Genauigkeitsniveau
ursprünglich gewählt hatte entzieht sich meiner Kenntnis;
denkbar wären Probleme mit der damals nicht sehr
umfangreichen Speicherausstattung der verwendeten Rechner
oder auch nur eine möglichst einfache Gestaltung des
Datenbestandes. Auf jeden Fall gab und gibt es Probleme,
wenn zwei identische Datenarten auf einer identischen
Stationierung stehen. In der ASB bewanderten Fachleuten
wird der Begriff des Metersprungs bestens bekannt
sein, Vermessern aber wird er einen sanften Schauer über den
Rücken jagen, denn die Station des zweiten Objektes wird
einfach um einen Meter versetzt.
Für einen Vermesser
ungewohnt ist zunächst die Genauigkeit, auf der die
Längenmessung in der ASB basiert. Würde man bei Trassierungen
Millimetergenauigkeit erwarten, so wird man erstaunt
feststellen, dass die Stationierung lediglich auf runden
Meterwerten beruht. Warum man dieses Genauigkeitsniveau
ursprünglich gewählt hatte entzieht sich meiner Kenntnis;
denkbar wären Probleme mit der damals nicht sehr
umfangreichen Speicherausstattung der verwendeten Rechner
oder auch nur eine möglichst einfache Gestaltung des
Datenbestandes. Auf jeden Fall gab und gibt es Probleme,
wenn zwei identische Datenarten auf einer identischen
Stationierung stehen. In der ASB bewanderten Fachleuten
wird der Begriff des Metersprungs bestens bekannt
sein, Vermessern aber wird er einen sanften Schauer über den
Rücken jagen, denn die Station des zweiten Objektes wird
einfach um einen Meter versetzt.
 Im Gegensatz zur
Stationierung erfolgen die Angaben in den DA104 - DA107 auf
Zenti- bzw. auf Millimeter. Für die Übernahme einer
Trassierung bedeutet dies, dass die i.d.R. auf Millimeter
genau berechneten Längen auf volle Meterbeträge umgesetzt
werden müssen, da die Trassierungsparameter ja mit ihrer
vollen Genauigkeit gespeichert werden sollten.
Im Gegensatz zur
Stationierung erfolgen die Angaben in den DA104 - DA107 auf
Zenti- bzw. auf Millimeter. Für die Übernahme einer
Trassierung bedeutet dies, dass die i.d.R. auf Millimeter
genau berechneten Längen auf volle Meterbeträge umgesetzt
werden müssen, da die Trassierungsparameter ja mit ihrer
vollen Genauigkeit gespeichert werden sollten.
Nach
anfänglicher Euphorie stagnierte die Datenerfassung – und
vor allem die Datenfortführung – bis gegen Ende der 70er
Jahre. Bei einem jährlichen Änderungsvolumen von etwa 6% des
Datenbestandes wirken sich Mängel in der Datenfortführung
über einen längeren Zeitraum auf einen Datenbestand recht
problematisch aus. Das Ergebnis war, dass Anfang der
80er-Jahre ein inkonsistenter Datenbankzustand zu drohen
schien. Da sich die Datenverarbeitung immer mehr von der
reinen Großrechnerphilosophie loslöste – die Stichworte
hiessen Dezentralisierung bzw. verteilte
Datenhaltung – wollten die Verwaltungen ihre
Straßendaten auch intensiver nutzen, mussten aber die
bedenkliche Datenqualität berücksichtigen. Die Frage
lautete: wie kann ich möglichst kostengünstig möglichst
viele Daten im Zuge einer Datenfortführung oder Neuerfassung
gewinnen und verarbeiten?
2. Anfänge einer automatisierten Straßendatenerfassung (1970 - 1980)
Wenn die fahrzeuggestützte Zuordnung von Objekten am Straßenrand zu einem bestimmten Videobild aus vermessungstechnischer Sicht auch heute noch nicht umfassend gelöst ist – trotz oder besser wegen GPS –, so muss man sich in die Anfänge der 70er-Jahre des letzten Jahrhunderts zurückversetzen: Fahrzeuge kannte man schon, eine fahrzeuggestützte Navigation war mit Hilfe von Kreiselmessgeräten oder – besser und deutlich teuerer – Inertialplattformen möglich, an professionelle Videoaufzeichnungen im Fahrzeug war kaum zu denken, an eine rechnergestützte Koppelung von Navigation und Videobild ebenfalls nicht.
Die Bundesanstalt für Straßenwesen (BASt) führte Ende der 70er Jahre erste Versuche mit fahrzeuggestützten Navigations-/Videosystemen durch. Das von einer Ingenieurfirma entwickelte System mit Namen GERDA verwandte Kreiselsysteme, um dreidimensionale relative Koordinaten über den Verlauf einer Straße ermitteln zu können. Auf Grund eines nur für Planungszwecke nutzbaren Genauigkeitshorizontes war GERDA in der praktischen Anwendung im Hinblick auf die ASB nicht erfolgreich, weil die Daten nicht den dort gestellten Anforderungen genügen konnten. GERDA wurde zwar weiterentwickelt, der angestrebte Einsatzumfang musste sich aber den prinzipbedingten Schwächen eines Kreiselsystems beugen.
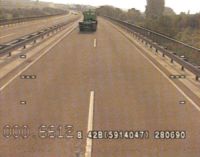
Mit der Praxis kommen die Ideen! Warum sollte man nicht auf eine eigenständige Navigation verzichten und den Bezug zu einem Ordnungssystem stattdessen aus einer Videoaufzeichnung eines Straßenverlaufes entnehmen, die über die Stationszeichen und eine im Bild mitlaufende Stationierung die eindeutige Netzzuordnung ermöglicht? Anfang der 80er-Jahre waren (bezahlbare) professionelle Videoaufzeichnungssysteme auf dem Markt verfügbar. VHS etc. schied von vorneherein aus, da die Bildqualität nicht zu vertretende sichtbare, vor allem aber messtechnische Mängel aufwies. Das damalige System der Wahl hieß U-Matic, ein professionelles Aufzeichnungssystem der Firma SONY [Videorecorder]. Ausgestattet mit Cassetten und ¾ Zoll-Band war eine einfache Handhabung und Archivierung der Bänder gewährleistet. Das Meßfahrzeug, ein Mercedes-Kastenwagen, war auf dem Dach über dem Fahrer mit einer 3-Röhren-Farbkamera (damalige Beschaffungskosten ca. 60.000 DM) ausgestattet. Die aufgezeichneten Bilder wurden durch Bildeinblendungen ergänzt: Ein von einer Startstationierung aus mitlaufender Längenwert (von einem Peiseler-Präzisionsmessrad bereitgestellt), Referenzinformationen (Von-Netzknoten) und einige Meßmarken, die später erläutert werden sollen (siehe).
Konnte dieses von einer Mainzer Ingenieurfirma entwickelte System auch relative Positionsdaten liefern, die den Anforderungen der ASB weitgehend entsprachen, so war eine automatisierte Koppelung mit dem Datenbestand der ASB noch nicht möglich. Hinzu kam, dass absehbar wurde, dass sich ganz erhebliche Mengen an Magnetbändern ergeben werden, die tunlichst auch in einem solchen System zu archivieren sein sollten.
Dieses
erste Videofahrzeug bestand aus einer auf dem Dach
montierten Kamera, dem Videorecorder, dem Längenmesssystem
und den Einrichtungen für das Einblenden von Text in die
Videobilder.
3. Straßen-Video-Meßsysteme (SVMS) (1980 - 1990)
Mittlerweile waren IBM-PCs auf dem Markt erhältlich, ein i8086-Prozessor mit sagenhaften 4 (vielleicht auch 6) MHz Taktfrequenz, rund 600 kBytes Arbeitsspeicher und einer Festplatte mit unglaublichen 20 MBytes – alles für nur 20.000 DM.
Für die dezentrale Datenverarbeitung bei der Straßenverwaltung in Hessen waren von besagter Mainzer Ingenieurfirma ein DV-Programm und ein Datenaustauschprotokoll entwickelt worden, mit dem ASB-Daten auf PCs vor Ort (also nicht beim Großrechner, sondern im entsprechenden Straßenbauamt) verarbeitet und mit dem Großrechner in der Hessischen Zentrale für Datenverarbeitung (HZD) ausgetauscht werden konnten. Dieses Programm namens SEDIT (Straßen-Einzeldaten-Editor) – es war im Jahre 2001 in einigen Bundesländern noch im Einsatz – wurde so umgerüstet, dass auch der direkte Zugriff auf ein bestimmtes Objekt auf einem Videoband hergestellt werden konnte – und dies mit mehreren Recordern (Primär-, Sekundär- und Lateralkameras; s.u.) gleichzeitig.
Zur Überprüfung der Beschilderung der Bundesautobahnen wurden von der BASt Möglichkeiten gesucht, um die Bilder der gesamten wegweisenden Beschilderung auf einer Bildplatte darstellen zu können. Aus Sicht des Videosystembetreibers machte dies den Einsatz einer weiteren, jetzt aber frei schwenkbaren Kamera – einer Sekundärkamera – im Fahrzeuginnenraum notwendig, da die bisher alleinig genutzte Primärkamera starr montiert war. Diese Sekundärkamera plazierte man vor dem Beifahrer, sodass dieser die Kamera schwenken und die Brennweiten den Gegebenheiten anpassen konnte.
Um die BASt mit den Bildern für ihre Bildplatte zu versorgen, war ein weiteres Videomessfahrzeug notwendig. Es wurde mit einer Primär-, einer Sekundär-, mehreren Lateralkameras, den entsprechenden Videorecordern, dem Längenmesser, einem Generator und einem Computer ausgestattet, der bereits während der Aufnahme die Verknüpfung von Videoframe, Stationierung und Netzknotenabschnitt herstellte. Ein Meßfahrzeug mit dieser Ausstattung wird heute als Straßen-Video-Meßsystem (SVMS) bezeichnet. Zu diesem Zeitpunkt stellte dieses SVMS – zumindest in Europa – das leistungsfähigste Meßsystem dieser Art dar.
Es war zu Beginn bereits auf Meßmarken hingewiesen worden, die in das Bild eingeblendet werden konnten. Zunächst verwendete man lediglich eine horizontal durch das Bild verlaufende Meßmarke. Diese befand sich genähert in der Bildmitte, also der Objektivachse. Diese Achse wurde so eingestellt, dass ihr Durchstoßpunkt durch die Straßenoberfläche ca. 10m vor dem Fahrzeug zu liegen kam – sie wird deshalb als 10-Meter-Marke bezeichnet.
 Da die Primärkamera – eine
3CCD-Profikamera – mit einem Varioobjektiv ausgestattet und
damit eine eindeutige Fixierung der Brennweiten nicht
möglich war, schied eine irgendwie geartete
Kalibrierungsmöglichkeit des Objektives bezüglich
Brennweite und Verzeichnung aus. Da das Fahrzeug als
Systemträger keine stabile Lage zu einem Horizont einnimmt,
muss die Lage des Fahrzeugkastens als Orts- bzw.
Zeitfunktion angesehen werden. Belastungstests haben
ergeben, dass sich die 10-Meter-Marke um etwa 10 cm
verlagert, wenn zwei Personen sich im Fahrzeug von vorne
nach hinten bewegen. Denkt man an die mehr oder weniger
zufällige Füllung des Tanks oder willkürlich mitgeführte
Zusatzbeladungen, so bedeutet dies, dass ein Meßsystem auf
der Grundlage der 10-Meter-Marke eine Lageungenauigkeit in
Längsrichtung von zunächst mindestens 10 cm aufweist. Dabei
wurde bisher von einer ideal ebenen Straße ausgegangen, die
bekanntlicherweise nicht existiert. Auch hier treten – in
Abhängigkeit von der Fahrgeschwindigkeit – Längenänderungen
in Folge von Nickbewegungen des Kastenaufbaus mit Werten
von nochmals mindestens 10 cm auf.
Da die Primärkamera – eine
3CCD-Profikamera – mit einem Varioobjektiv ausgestattet und
damit eine eindeutige Fixierung der Brennweiten nicht
möglich war, schied eine irgendwie geartete
Kalibrierungsmöglichkeit des Objektives bezüglich
Brennweite und Verzeichnung aus. Da das Fahrzeug als
Systemträger keine stabile Lage zu einem Horizont einnimmt,
muss die Lage des Fahrzeugkastens als Orts- bzw.
Zeitfunktion angesehen werden. Belastungstests haben
ergeben, dass sich die 10-Meter-Marke um etwa 10 cm
verlagert, wenn zwei Personen sich im Fahrzeug von vorne
nach hinten bewegen. Denkt man an die mehr oder weniger
zufällige Füllung des Tanks oder willkürlich mitgeführte
Zusatzbeladungen, so bedeutet dies, dass ein Meßsystem auf
der Grundlage der 10-Meter-Marke eine Lageungenauigkeit in
Längsrichtung von zunächst mindestens 10 cm aufweist. Dabei
wurde bisher von einer ideal ebenen Straße ausgegangen, die
bekanntlicherweise nicht existiert. Auch hier treten – in
Abhängigkeit von der Fahrgeschwindigkeit – Längenänderungen
in Folge von Nickbewegungen des Kastenaufbaus mit Werten
von nochmals mindestens 10 cm auf.
 Die 10-Meter-Marke sollte
aber nicht nur zur Längenmessung eingesetzt werden, es war
darüber hinaus auch denkbar, Straßenbreiten auszumessen.
Dazu wurde zunächst ein Maßstabsfaktor ermittelt. Mit einem
Koordinatenmessgerät konnten sodann vertikale Meßmarken
gesetzt und deren Abstand gemessen werden. Dieser Abstand
in Pixeln wurde dann mit dem Maßstabsfaktor in einen
metrischen Wert umgeformt. Bedingt durch die geringe Anzahl
Pixel in der Breite des Bildes und die Dicke der Meßmarken
von mehreren Pixeln war auch hier eine Meßgenauigkeit besser
als 10 cm nur in Sonderfällen zu erreichen. Diese
Ungenauigkeit wurde noch verschärft, wenn sich die
Straßenbreite änderte bzw. in Kurven.
Die 10-Meter-Marke sollte
aber nicht nur zur Längenmessung eingesetzt werden, es war
darüber hinaus auch denkbar, Straßenbreiten auszumessen.
Dazu wurde zunächst ein Maßstabsfaktor ermittelt. Mit einem
Koordinatenmessgerät konnten sodann vertikale Meßmarken
gesetzt und deren Abstand gemessen werden. Dieser Abstand
in Pixeln wurde dann mit dem Maßstabsfaktor in einen
metrischen Wert umgeformt. Bedingt durch die geringe Anzahl
Pixel in der Breite des Bildes und die Dicke der Meßmarken
von mehreren Pixeln war auch hier eine Meßgenauigkeit besser
als 10 cm nur in Sonderfällen zu erreichen. Diese
Ungenauigkeit wurde noch verschärft, wenn sich die
Straßenbreite änderte bzw. in Kurven.
Diese Beträge von 10 cm sind im Vergleich mit der Längenauflösung von 1 m aus der ASB eine Marginalie. Aber aus den Kommunen kamen Anforderungen, das Straßeninventar (Laternen, Gullies, Bäume etc.) zu erfassen. Dies erfolgte bis dato mit konventionellen Meßmethoden, i.d.R. also mittels Tachymeter und damit kann problemlos eine Genauigkeit von rund 1 cm eingehalten werden. Sollte ein neues Meßsystem mit tachymetrischen Aufnahmeverfahren konkurrieren wollen, so war dieser Wert als Richtschnur anzusehen. Man mag je nach Grund der Datenerfassung darüber streiten, ob ein Kanaldeckel oder eine Laterne auch tatsächlich auf den Zentimeter genau erfasst werden müssen, aber der Betrag stand nun einmal im Raum.
Die eigentliche Längenmessung des Fahrzeugs – nicht deren Visualisierung im Videobild – war zu keinem Zeitpunkt ein grösseres Problem. Es kamen Präsizionsinkrementalgeber u.a. der Firma Peiseler zum Einsatz, die 2000 Impulse pro Radumdrehung lieferten. Geht man von einem Radumfang von einem Meter aus, so wird eine Radumdrehung in rund 0,5 mm große Teilstücke zerlegt – und dies bei einer kleinsten Auflösung der Stationierung von 1 m. Es kamen auch andere Inkrementalgeber zum Einsatz, die lediglich 500 Impulse/Umdrehung lieferten, aber auch damit ergeben sich immer noch 2mm Auflösung.
Nach ASB wird die örtlich nicht mehr reproduzierbare – planerische – Trassierungsachse mit der geglätteten Mittellinie der ausgebauten Straße angenähert. Da das SVMS mit dem linken Vorderrad auf dieser Mittellinie fährt, beziehen sich alle Stationierungen direkt auf diese Mittellinie. Da in der ASB die Länge eines Netzknotenabschnittes bekannt ist, lassen sich die immer auftretenden Längenmessfehler bequem abgleichen. Beim Zugriff auf die Videobänder am Videoarbeitsplatz im Innendienst wurde dieser Längenabgleich übrigens automatisch berücksichtigt.
Kommen wir auf die Probleme einer kommunalen Datenerfassung zurück. Die Probleme mit der 10-Meter-Marke konnten durch Anbringung von zwei links- und rechtsblickenden Lateralkameras weitgehend beseitigt werden. Da diese Kameras direkt über den Hinterachsen montiert wurden, waren kameraseitige Längenfehler ausgeschlossen. Dadurch, dass diese Kameras geneigt montiert wurden und leicht über das Fahrzeug hinausstanden, konnte man die Radnaben im Bild sehen und damit die Ausrichtung der Kameras überprüfen. Breiten waren so besser zu messen, als auf der 10m-Linie: gemessen wurde immer auf der Meßachse im Bild (die sich aus der Radnabe senkrecht zur Fahrzeugwand ergab) indem die Koordinatendifferenzen der Bildpixel ausgewertet wurden. Auf Grund der Kameraschräge und der Objektivverzeichnung kann diese Pixeldifferenz jedoch nicht eine lineare Beziehung zu einem metrischen Abstandswert vom Fahrzeug ergeben. Aus diesem Grunde wurde jeden Morgen ein Meßbild aufgezeichnet, aus dem dann eine Maßstabsfunktion für die Breitenmessung abgeleitet werden konnte.
Obwohl
die Meßanordnung eigentlich eine Genauigkeit von 1-2 cm
ergeben sollte, kann dieser Wert in der Praxis nicht
erreicht werden. Der Grund wurde bereits ausgeführt, er
ergibt sich aus der Schwankung und Verkantung des
Fahrzeugkastens gegenüber der – auch hier – unebenen
Straßenoberfläche und einem fehlenden Horizont. Um die
Abweichungen zu einem stabilen Horizont zu ermitteln wurden
verschiedene Überlegungen angestellt, die meines Wissens
aber bis heute (2001) nie umgesetzt worden sind (eine
Überlegung basierte auf zwei hochgedämpften elektronischen
Libellen). Berücksichtigt man noch die Anlegefehler
bei der Übernahme der Einrichtungsdaten für das SVMS, so
sieht man, das die Anforderungen an das System im Vergleich
mit einem Tachymeter nicht bestehen können. Die Frage muss
aber sein, ob eine derart hohe Genauigkeitsanforderung für
ein SVMS eigentlich erforderlich sein muss.
4. Integrierte autonome fahrzeuggestützte Video-Meßsysteme (iSVMS) (1990-2000)
Ein fundamentaler 'Mangel' an der bisherigen SVMS-Meßtechnik war, dass die gesamte Befahrung eine vorhandene örtliche Stationierung des befahrenen Netzknotenabschnittes erfordert, da sich das SVMS visuell in dieses System einklinkt. Mit den Fortschritten in der zivilen GPS-Navigation war zu überlegen, ob man dieses Verfahren nicht auch in einem SVMS zum Einsatz bringen sollte.
Auch die Fortschritte in der Bildverarbeitungstechnik liessen eine Eliminierung der Meßfehler bei der geometrischen Erfassung des Straßeninventars möglich erscheinen.
Eine Ingenieurfirma in Vechta griff diese Gedanken auf und entwickelte ein integriertes, autonomes und fahrzeuggestütztes Video-Meßsystem (iSVMS). Dabei stand integriert für die Möglichkeit der visuellen und geometrischen Erfassung des Straßeninventars, autonom für die Unabhängigkeit von bestehenden Ordnungssystemen und fahrzeuggestützt für die Integration aller Komponenten in einem Fahrzeug. Ergänzend zu den bisherigen SVMS-Komponenten kamen ein GPS-Empfänger und eine streng stereoskopisch / photogrammetrische Auswertung von Stereo-Video-Aufnahmen hinzu.
Versuche mit Vertriebspartnern der Firma TRIMBLE ergaben, dass mit einem Fahrzeug mehrfach befahrene identische Wegstrecken Lageabweichungen von nur rund 10 cm ergaben. Berücksichtigt man die fahrbedingten Abweichungen von der Sollinie, so liegt der reine GPS-Fehler bei weit unter 10 cm. Es wurde allerdings nicht nur ein GPS-Empfänger eingesetzt, sondern es kam eine differentielle Meßanordnung mit zwei unabhängig betriebenen GPS-Empfängern zum Einsatz.
Das generelle Hauptproblem beim GPS-Einsatz ist die äusserst geringe Sendeleistung der GPS-Satelliten. So kann es ausreichen, sich mit einer Antenne unter einen blattlosen Baum zu stellen, um das Signal abreissen zu lassen. Bei ersten Tests bereitete dieser Sachverhalt massive Probleme, denn in der Praxis reisst das Signal bei einer Straßenbefahrung bei nahezu jedem Baum und unter Brücken sowieso ab. Eigentlich müsste sich das GPS-System nach jedem Signalabriß neu orientieren, was einen Halt des Fahrzeugs bedeutet. Da dies in der Praxis aber vollkommen undenkbar ist, gab es Ansätze, das Problem im post processing mathematisch anzugehen, indem die Auswertesoftware die einzelnen 'verlorenen' Meßbereiche zusammenrechnet. Bezeichnet wird dieses Rechenmodell als on the fly. Mittlerweile gehört der Betrieb von GPS-Empfängern zur Standardausstattung derartiger Meßfahrzeuge und diesbezügliche Leistungen werden von zahlreichen Firmen im Bundesgebiet angeboten.
 Was bisher nicht gelöst
war, dies ist eine weitgehend 'fehlerfreie' Erfassung des
Standardinventars einer Straße (z.B. Laternen, Gullies,
Bäume). Die bisherigen Lösungsansätze beinhalteten derart
viele Fehlerquellen, dass man von einer Punktgenauigkeit von
1-2 cm noch weit entfernt ist. Was könnte man verbessern?
Aus messtechnischer Sicht müssen die Montage- und
Objektivparameter der Kameras bekannt sein. Wenn man sich
vorstellt, die Position und Neigung der beiden Stereokameras
im Winter bei Frost per Hand auf dem Fahrzeugdach
auszumessen – selbstverständlich auf Millimeter –, wird
schnell die Aussichtslosigkeit seines Unterfangens
erkennen. Gleiches gilt für die Objektive: wie will man bei
einem Varioobjektiv eine Brennweite reproduzieren und
darüber hinaus noch die Verzeichnungseigenschaften
berücksichtigen? Es klingt vielleicht vermessen – daher
vielleicht auch der Ausdruck Vermesser
– aber diese Probleme stellen in der Photogrammetrie
einen zu behandelnden Standardfall dar, der
ausgleichungstechnisch in einem Guss gerechnet werden kann.
Es können die Kamerabrennweiten (Kammerkonstanten), die
XYZ-Basen der Kameras und die Objektivverzeichnungen
bestimmt werden. Wie erhält man diese Werte aber? Dazu sei
zunächst einmal auf ein Photogrammetrie-Lehrbuch verwiesen
(z.B. [Finsterwalder]), denn
die Berechnung ist für einen Computer zwar schnell erledigt,
das dahinter stehende Ausgleichungsmodell ist mathematisch
aber recht anspruchsvoll und erfordert reichlich Erfahrung
in der Ausgleichungsrechnung. Die Orientierungswerte für die
Kameras erhält man durch den Aufbau eines Passpunktfeldes.
Dieses sollte möglichst eben und horizontal sein. Auf ihm
werden an definierten Punkten Zielmarken aufgestellt.
Sinnvoll ist es, wenn die Bodenpunkte mit
Standard-Vermarkungsrohren versehen sind, sodass man in
ihnen die Stäbe mit den Zielmarken einstecken kann. Wichtig
für die Ausgleichung ist, dass die Lage der Zielmarken sich
im Stereoerfassungsbereich der Kameras befindet und dass sie
in der Tiefe und in der Höhe gut räumlich verteilt sind.
Insgesamt sollten 10 - 20 solcher Punkte berücksichtigt
werden. Die räumliche Tiefe des Meßfeldes sollte der
maximalen Meßweite zuzüglich etwa 20% entsprechen. Dadurch,
dass das Passpunktfeld vermessungstechnisch in Lage und Höhe
eingemessen wurde und die Länge der Zielmarkenhalter
ebenfalls bekannt ist, liegt ein dreidimensionaler
Passpunkthaufen vor. Die Punkte sollten eine Genauigkeit von
unter 1cm in jeder Raumlage aufweisen. Bewährt hat sich die
Einrichtung einer derartigen statischen Eichanlage auf
selten genutzten Parkplätzen, Straßenmeisterei- oder
Raiffeisen-Betriebshöfen etc. Die Zielmarkenhalter können
aus präparierten Fluchtstäben bestehen; es ist allerdings
darauf zu achten, dass die Stäbe eindeutig fixiert in das
Vermarkungsrohr eingeführt werden können und windfest sein
sollten. Eine genaue Ermittlung der Verzeichnung erfolgt
mittels Meßbildern [Finsterwalder],
bei geringeren Anforderungen an die Erfassung der
Verzeichnung und bei einer ausreichend grossen Zahl
Passpunkte, kann dieser Arbeitsschritt bei der Bestimmung
von Objektivbrennweite und Basis mit erledigt werden. Um
systematische Einflüsse in den Griff zu bekommen, muss eine
derartige Eichung mindestens vor und nach einer Meßkampagne
von i.d.R. einer Woche stattfinden, bei sehr schlechten
Fahrbahnzuständen evtl. auch zweimal täglich. Dann lassen
sich die Abweichungen bezogen auf die Zeitachse ermitteln.
Das Prozedere erscheint aufwendig, lässt sich aber pro
Eichvorgang in weniger als 30 Minuten auf einem
vorbereiteten Eichplatz realisieren. Setzt man die
erfassbare Datendichte eines Tachymeters in Relation zu
einem iSVMS, dann erkennt man schnell, welche Datenmengen
auf einem Videoband 'gespeichert' sind: nämlich sämtliche
Objekte im Stereobereich der Frontkameras.
Was bisher nicht gelöst
war, dies ist eine weitgehend 'fehlerfreie' Erfassung des
Standardinventars einer Straße (z.B. Laternen, Gullies,
Bäume). Die bisherigen Lösungsansätze beinhalteten derart
viele Fehlerquellen, dass man von einer Punktgenauigkeit von
1-2 cm noch weit entfernt ist. Was könnte man verbessern?
Aus messtechnischer Sicht müssen die Montage- und
Objektivparameter der Kameras bekannt sein. Wenn man sich
vorstellt, die Position und Neigung der beiden Stereokameras
im Winter bei Frost per Hand auf dem Fahrzeugdach
auszumessen – selbstverständlich auf Millimeter –, wird
schnell die Aussichtslosigkeit seines Unterfangens
erkennen. Gleiches gilt für die Objektive: wie will man bei
einem Varioobjektiv eine Brennweite reproduzieren und
darüber hinaus noch die Verzeichnungseigenschaften
berücksichtigen? Es klingt vielleicht vermessen – daher
vielleicht auch der Ausdruck Vermesser
– aber diese Probleme stellen in der Photogrammetrie
einen zu behandelnden Standardfall dar, der
ausgleichungstechnisch in einem Guss gerechnet werden kann.
Es können die Kamerabrennweiten (Kammerkonstanten), die
XYZ-Basen der Kameras und die Objektivverzeichnungen
bestimmt werden. Wie erhält man diese Werte aber? Dazu sei
zunächst einmal auf ein Photogrammetrie-Lehrbuch verwiesen
(z.B. [Finsterwalder]), denn
die Berechnung ist für einen Computer zwar schnell erledigt,
das dahinter stehende Ausgleichungsmodell ist mathematisch
aber recht anspruchsvoll und erfordert reichlich Erfahrung
in der Ausgleichungsrechnung. Die Orientierungswerte für die
Kameras erhält man durch den Aufbau eines Passpunktfeldes.
Dieses sollte möglichst eben und horizontal sein. Auf ihm
werden an definierten Punkten Zielmarken aufgestellt.
Sinnvoll ist es, wenn die Bodenpunkte mit
Standard-Vermarkungsrohren versehen sind, sodass man in
ihnen die Stäbe mit den Zielmarken einstecken kann. Wichtig
für die Ausgleichung ist, dass die Lage der Zielmarken sich
im Stereoerfassungsbereich der Kameras befindet und dass sie
in der Tiefe und in der Höhe gut räumlich verteilt sind.
Insgesamt sollten 10 - 20 solcher Punkte berücksichtigt
werden. Die räumliche Tiefe des Meßfeldes sollte der
maximalen Meßweite zuzüglich etwa 20% entsprechen. Dadurch,
dass das Passpunktfeld vermessungstechnisch in Lage und Höhe
eingemessen wurde und die Länge der Zielmarkenhalter
ebenfalls bekannt ist, liegt ein dreidimensionaler
Passpunkthaufen vor. Die Punkte sollten eine Genauigkeit von
unter 1cm in jeder Raumlage aufweisen. Bewährt hat sich die
Einrichtung einer derartigen statischen Eichanlage auf
selten genutzten Parkplätzen, Straßenmeisterei- oder
Raiffeisen-Betriebshöfen etc. Die Zielmarkenhalter können
aus präparierten Fluchtstäben bestehen; es ist allerdings
darauf zu achten, dass die Stäbe eindeutig fixiert in das
Vermarkungsrohr eingeführt werden können und windfest sein
sollten. Eine genaue Ermittlung der Verzeichnung erfolgt
mittels Meßbildern [Finsterwalder],
bei geringeren Anforderungen an die Erfassung der
Verzeichnung und bei einer ausreichend grossen Zahl
Passpunkte, kann dieser Arbeitsschritt bei der Bestimmung
von Objektivbrennweite und Basis mit erledigt werden. Um
systematische Einflüsse in den Griff zu bekommen, muss eine
derartige Eichung mindestens vor und nach einer Meßkampagne
von i.d.R. einer Woche stattfinden, bei sehr schlechten
Fahrbahnzuständen evtl. auch zweimal täglich. Dann lassen
sich die Abweichungen bezogen auf die Zeitachse ermitteln.
Das Prozedere erscheint aufwendig, lässt sich aber pro
Eichvorgang in weniger als 30 Minuten auf einem
vorbereiteten Eichplatz realisieren. Setzt man die
erfassbare Datendichte eines Tachymeters in Relation zu
einem iSVMS, dann erkennt man schnell, welche Datenmengen
auf einem Videoband 'gespeichert' sind: nämlich sämtliche
Objekte im Stereobereich der Frontkameras.
Ausgewertet werden die Stereobilder an einem stereotauglichen Computermonitor mittels Parallaxen- oder Einzelbildmessung mit rechnerischer Wiederherstellung der Orientierung.
Aber trotz allen Aufwandes können die besagten 1-2 cm Meßgenauigkeit immer noch nicht erreicht werden. Ein Grund findet sich wieder im fehlenden Horizont bzw. der Fahrzeugschwankung. Ein weiterer Grund findet sich in der geringen horizontalen Auflösung, die von einem Aufzeichnungssystem bereitgestellt wird. U-Matic liefert hier 300 Linien, S-VHS 400, BetaCam 600 und das digitale SONY D2-System weit über 600 Linien. Rechnet man diese Auflösungen auf der 10m-Linie mit etwa 20m Bildbreite um, so erhält man als kleinste Auflösung für U-Matic 7cm, für S-VHS 5cm, für BetaCam 3cm und für D2 Werte unter 1cm.
Man
erkennt klar, dass der messtechnisch heikelste Punkt in der
Horizontfrage zu suchen ist. Wer sich dagegen mit
einem Genauigkeitshorizont von etwa 10 cm zufrieden gibt,
der kann mit einem iSVMS kostengünstig Unmengen von Daten in
seine Datenbanken 'spülen'.
5. Derzeitiger Stand der Technik (2001)
Viele der Probleme, die einem vor Jahren das Leben schwer machten, bestehen heute nicht mehr. Die Frage, ob U-Matic, S-VHS oder BetaCam besser geeignet sind wurde dadurch beantwortet, dass Datenaufzeichnungen mittlerweile direkt im Fahrzeug auf Festplatte, CD-ROMs oder DVD erfolgen – digital und damit in unvergleichlich höherer Qualität als früher. Wobei auch Bildauflösungen gespeichert werden könnten, die die Fernsehnormen eigentlich nicht vorsehen. Da Videokameras immer höhere Bildauflösungen bereitgestellt haben, als Videorecorder tatsächlich aufzeichnen konnten, darf man an digitale Kameras denken, die Horizontalauflösungen von deutlich mehr als 600 Linien liefern. Nimmt man ein konventionelles Fernsehbild mit 575 sichtbaren Zeilen/Bild und 520 Punkten/Zeile, dann ergeben sich rund 300.000 Bildpunkte im Videobild. Eine Still-Video-Kamera mit einer derartigen Auflösung wäre heute nicht mehr zu vermarkten, hier liegt die am Markt verfügbare Obergrenze für die CCD-Auflösung mittlerweile (Herbst 2001) bei rund 4.000.000 Bildpunkten!
Auch die Schwierigkeiten mit GPS wurden durch differentielle Meßverfahren bzw. SAPOS etc. deutlich reduziert. Denkt man an drei parallel betriebene GPS-Systeme in entsprechender Meßanordnung, so wäre auch die Horizontfrage in einer ersten Näherung lösbar.
Stereoskopisch
/ photogrammetrische Erfassungs- und Auswertesysteme findet
man auf dem Markt jedoch nicht, weswegen die gängigen SVMS
aus heutiger Sicht in vermessungstechnischem Sinne
eigentlich nicht als Meßsysteme sondern eher als Erfassungssysteme
bezeichnet werden sollten.
Verweise
|
Der Betreiber dieser Seite ist ausdrücklich nicht für die Inhalte externer Internetseiten verantwortlich. |
|
|
Bundesminister für Verkehr: ASB – Anweisung Straßeninformationsbank – SIB-Netz |
|
|
Bundesminister für Verkehr: ASB – Anweisung Straßeninformationsbank – SIB-Objekte |
|
|
Finsterwalder, Richard; Hofmann, Walther: Photogrammetrie; Verlag Walter de Gruyter & Co.; Berlin, 1968/3. |
|
|
______________________________________________________________________ |
|
|
__________________________
Curriculum
